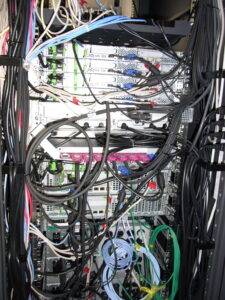
最初にお断りしておきますが、私は低速型アナログコンピュータの実機を見たことがありません。
低速型は大きな筐体のパネルに電線を差し込む穴がたくさん開いていてパネルの中にある加算積分器や乗算器やポテンショメータや演算増幅器などを電線で結んで可変抵抗器や可変コンデンサなどのパラメータをセットしながらプログラミングする機械で(繰り返し型よりも)はるかに計算精度が高いものでした。
価格もはるかに高い装置で、私達公立中学校の生徒にさわらせてもらえるようなものではありませんでした。
したがって私は教科書に載っていた写真と先生の授業で習ったこと以外は知りません。
プログラミンの仕方については次回概要を書きますが、きょうは両方の型の演算開始や停止についてお話します。
なお低速型では演算開始、演算停止以外に保持というのも使えます。
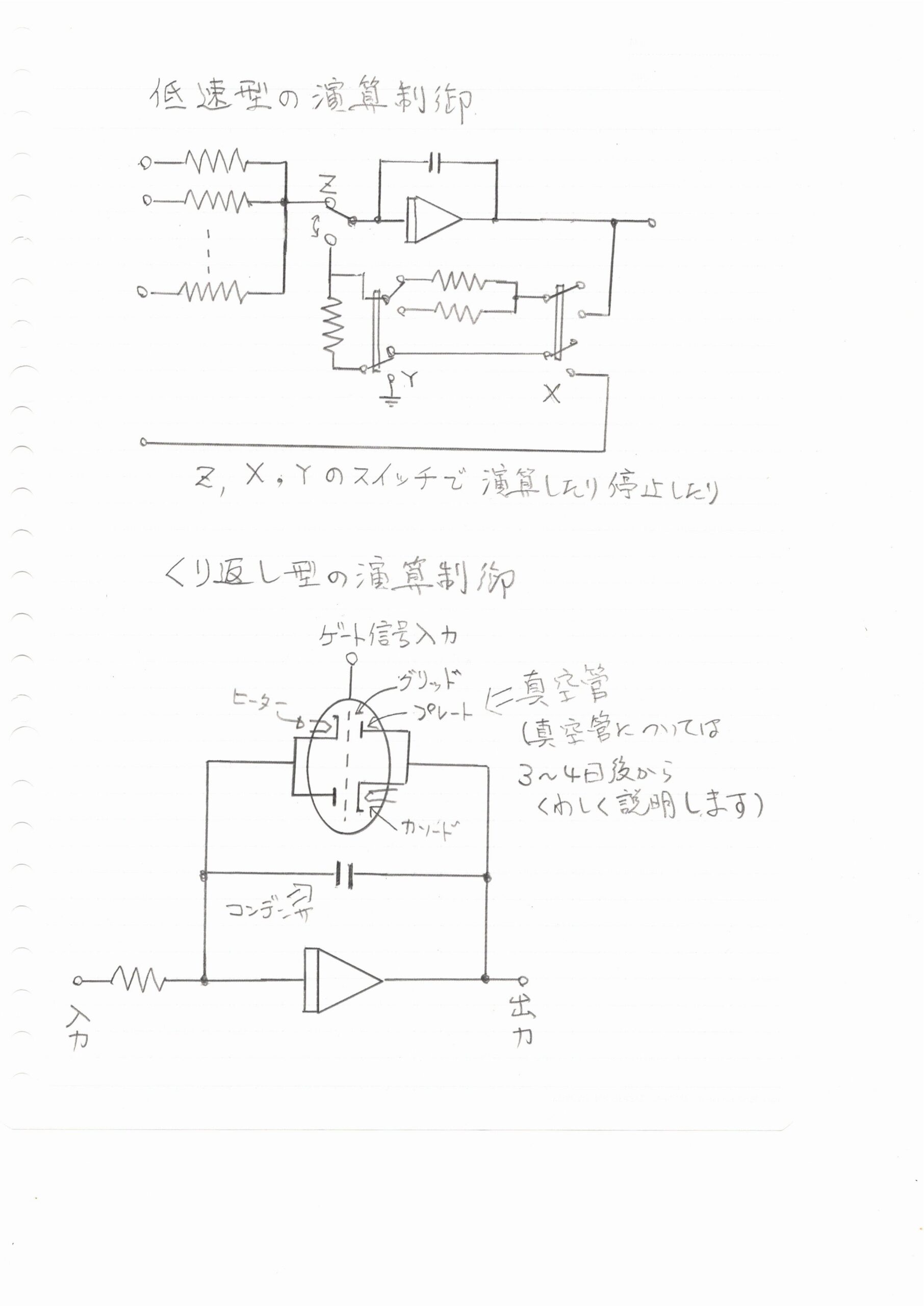
まず低速型の演算制御ですが、手描き図の上半分が低速型の制御図です。
XとかYとか書いてある連動スイッチや入力から最初の積分器へのスイッチZの存在が読めますでしょうか。
これらを入れたり切ったり保持したりに使います。
低速型については私自身が使った経験がありませんので、説明はこれぐらいにしておきます。
ただし資料はありますので、ご自身で資料を読んで研究したいというかたはコメントにそのように書いてください。
次に繰り返し型ですが、手描き図の下半分の説明図を入れました。
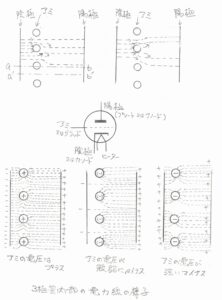
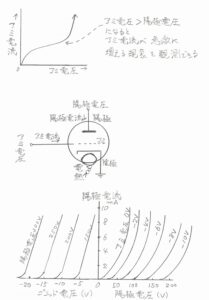
真空管のグリッドにゲート信号を入れて、コンデンサからの放電に合わせて動作を繰り返します。
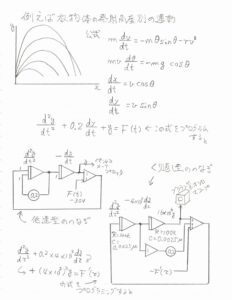
次回は放物線を描くときの発射角度による何秒後には物体がどこに飛んでいるのかを計算する例を書きますので(次回は)今回よりはおもしろいと思います。
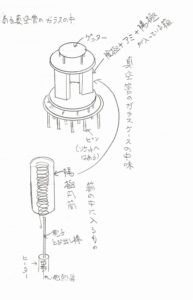
そのあとでじっくり真空管のことを解説します。
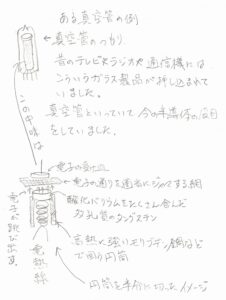
昭和30年代の真空管式アナログコンピュータは大きく分けて低速型と繰り返し型の2種類がありました。